Intel® RealSense™ Depth Camera D435f




Enhanced depth quality with IR
The Intel® RealSense™ Depth Camera D435f expands our portfolio targeting the growing market of autonomous mobile robots. The D435f utilizes an IR pass filter to enhance depth noise quality and performance range in many robotic environments.
See better with infrared
The D435f works well both indoors and outdoors, and the IR pass filter improves depth quality in scenes with repetitive patterns and mitigates visible reflections.



Cut the glare
Mitigates glare from overhead lights reflected by shiny floors and enhances the textured IR projector pattern.

Solutions that work.
Resolves false depth seen in scenes with repetitive vertical pattern, such as poles in airport, vertical blinds, pipes in ceiling, floor drains and small floor tiles.
Robotics in the real world.
The D435f is an excelent addition to the D400 family which is used in a wide range of robotic use cases.

Start developing with intel realsense sdk 2.0
Our open-source SDK 2.0 offers a variety of wrappers supporting popular programming languages and platforms.









![]()


Tech Specs
| Features | Use environment: Indoor/Outdoor |
Ideal Range: .3 m to 3 m |
| Depth | Depth technology: Stereoscopic Minimum Depth Distance (Min-Z) at Max Resolution: ~28 cm Depth Accuracy: <2% at 2 m(2) Image sensor technology: Global Shutter |
Depth Field of View (FOV): 87° × 58°(1) Depth output resolution: Up to 1280 × 720 Depth frame rate: Up to 90 fps |
| Filter | Depth Filter IR Pass |
RGB Filter IR Cut |
| RGB | RGB frame resolution: Up to 1920 × 1080 RGB frame rate: 30 fps RGB sensor technology: Rolling Shutter |
RGB sensor FOV (H × V): 69 × 42°(1) RGB sensor resolution: 2 MP |
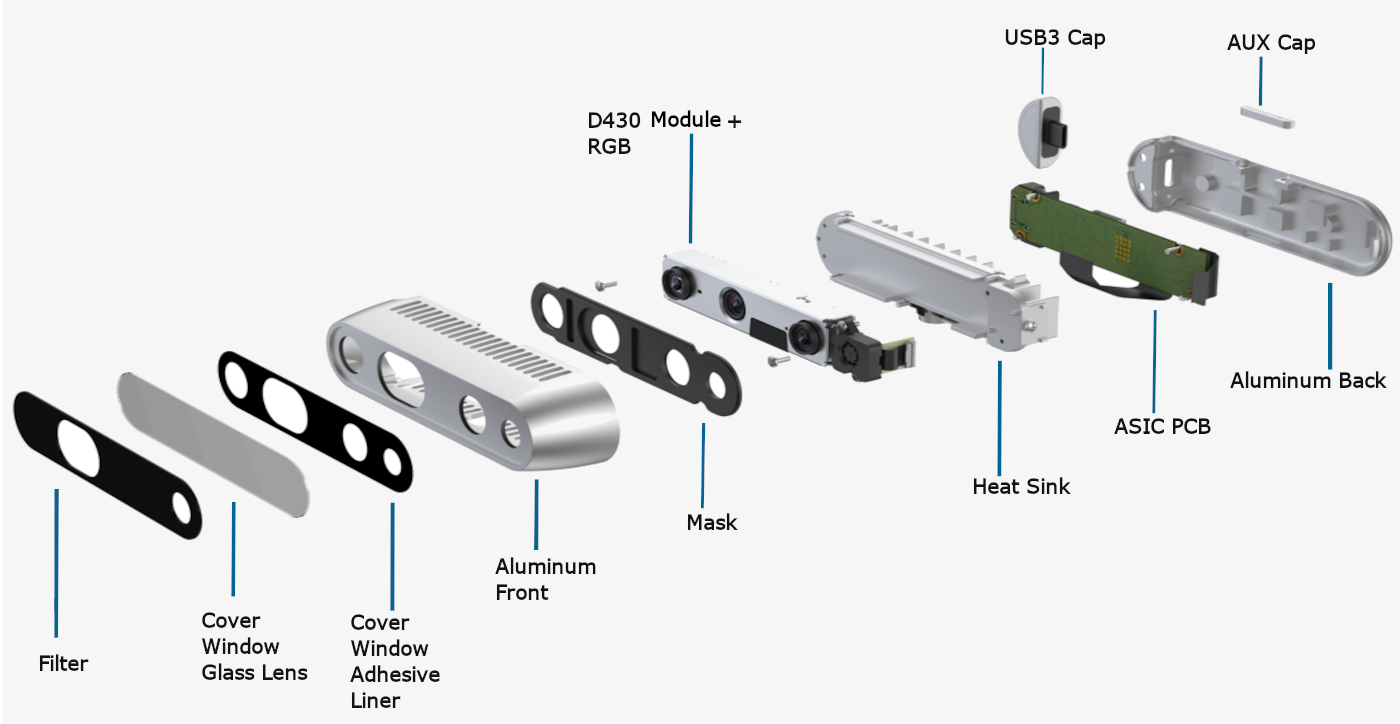
| Major Components | Camera module: Intel RealSense Module D430 + RGB Camera |
Vision Processor Board: Intel RealSense Vision Processor D4 |
| Physical | Form factor: Camera Peripheral Length × Depth × Height: 90 mm × 25.8 mm × 25 mm |
Connectors: USB‑C* 3.1 Gen 1* Mounting mechanism: – One 1/4‑20 UNC thread mounting point – Two M4 thread mounting points |
1 FOV (H x V) is measured +/-3° of stated value
2 Z-accuracy as measured out of the factory
Enter the code in the box below: