ROBOTIS Manipulator-H
Product Code: ROBT 905-0016-000


This product has been discontinued
■ Description
Multi-purpose, low-cost manipulator 6 DOF (built with Dynamixel Pro) Modular structure for easy maintenance Lightweight design for easy placement and mobility.Endures payload suitable for small to mid scale operations. Wide operation range Suitable for repetitive and high precision operation USB interface, RS-485 communication Provides SDK for user programming (provides examples of forward / inverse kinematics, profile control).
■ Package Contents
|
Description |
Quantity |
|
|
Product |
Manipulator-H (fully assembled) |
1 |
|
Storage bag |
Case |
1 |
|
PC interface |
USB2Dynamixel |
1 |
|
Accessory |
Extra cable set (4P, 2P) |
1 set |
|
Screw set (WB M2.5 and others) |
1 set |
|
|
USB memory (SDK, manual) |
1 |
|
|
Quickstart book |
1 |
|
■ H/W Specifications
|
Manipulator-H |
|
|
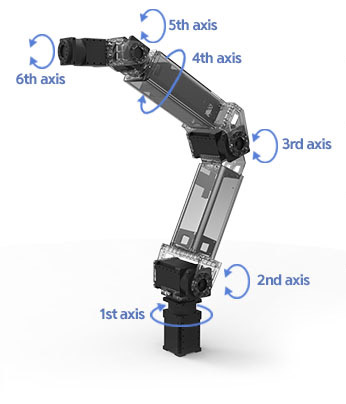
DOF |
6 |
|
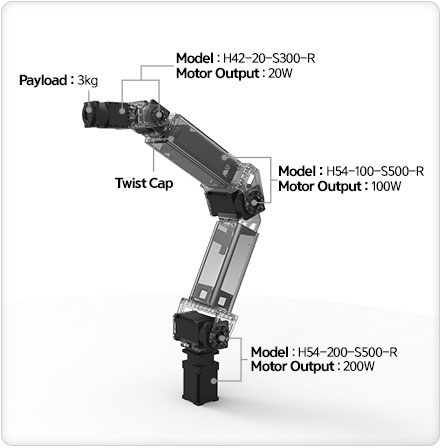
Payload (kg) |
3 |
|
Repeatability (mm) |
±0.05 |
|
Speed (Each joint, deg/sec) |
180 |
|
Weight (kg) |
5.5 |
|
Reach (mm) |
645 |
|
Rated voltage (VDC) |
24 |
|
Communication |
RS-485 (Multi Drop Bus) |
|
Power (Joint) |
200W : 2EA |
|
100W : 2EA |
|
|
20W : 2EA |
|
|
Software |
ROBOTIS Manipulator SDK |
|
Controller |
PC (Not Included) |
■ S/W Specifications
- Arm access communication protocol library and examples
- Arm control parameter setting and monitoring example
- Kinematics library (FK, IK) and examples
- Joint / end point profile control library and examples
■ Actuator Configuration
■ Actuator (DYNAMIXEL PRO) Description
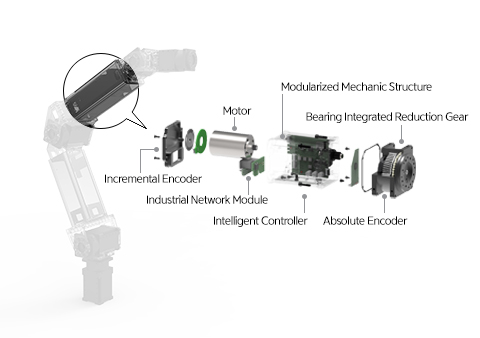
All-in-one module
DC Motor + Controller + Driver + Sensor + Cycloid Reduction Gear
Small, Lightweight
- Minimized module size with the self-developed small, lightweight, cycloid reduction gear
- High weight to output rate (0.05Nm/g)
- High shock resistance
Precise control and low backlash
- Incremental encoder and contactless magnetic encoder for absolute positioning
- Low backlash of 3~4arcmin
- Performance data provided, tested by KOLAS (Korea Laboratory Accreditation Scheme)
Torque control using current sensor
- High current sensing algorithm and current feedback control
- Position, speed, and current control using an algorithm
Easy development environment
- Provides C-based library
- Provides various solution examples (C++, LabVIEW, C#, eclipse, JAVA, etc.)
■ Key Purpose
- Research and Education
- Experiment with kinematics and dynamics
- Design and research two-armed robot system
- Mobile robot system
Industrial Field Operation
- Test and examination equipment
- Small transport system
■ Control Environment
■ Drawings
■ e-Manual
■ Optional Products (sold separately)
Write a review
Your Name:
Your Review:
Note: HTML is not translated!
Rating:
Bad
Good
Enter the code in the box below:
-
 ₹13,299.00
₹13,299.00

![ROBOTIS-OP Deluxe Edition [EU-220V]](https://www.mgsuperlabs.co.in/estore/image/cache/data/ROBT/20jan/905-0012-400/Darwin_OP_1-80x80.jpg)

![ROBOTIS GP [EU-220V]](https://www.mgsuperlabs.co.in/estore/image/cache/data/ROBT/20jan/901-0026-410/view_20110329054950b-80x80.jpg)
![ROBOTIS Premium [EU-220V]](https://www.mgsuperlabs.co.in/estore/image/cache/data/ROBT/20jan/901-0006-400/view_20100812102126b-80x80.jpg)

![ROBOTIS STEM Level 2 [EN]](https://www.mgsuperlabs.co.in/estore/image/cache/data/ROBT/901-0029-200/ROBOTIS_STEM_LV2_KO_tn-80x80.jpg)
![OLLO Inventor Kit [EN]](https://www.mgsuperlabs.co.in/estore/image/cache/data/ROBT/20jan/901-0024-200/view_20110217072406b-80x80.jpg)
![OLLO Explorer Kit [EN]](https://www.mgsuperlabs.co.in/estore/image/cache/data/ROBT/21jan/901-0022-200/view_20130916022137b-80x80.jpg)








-80x80.jpg)





© 2025, MG Automation Technologies. Powered by MG Super LABS.Find us on Google+
Designed with by Ish Gupta