Pixhawk Jetson Baseboard
Product Code: Holybro 11072


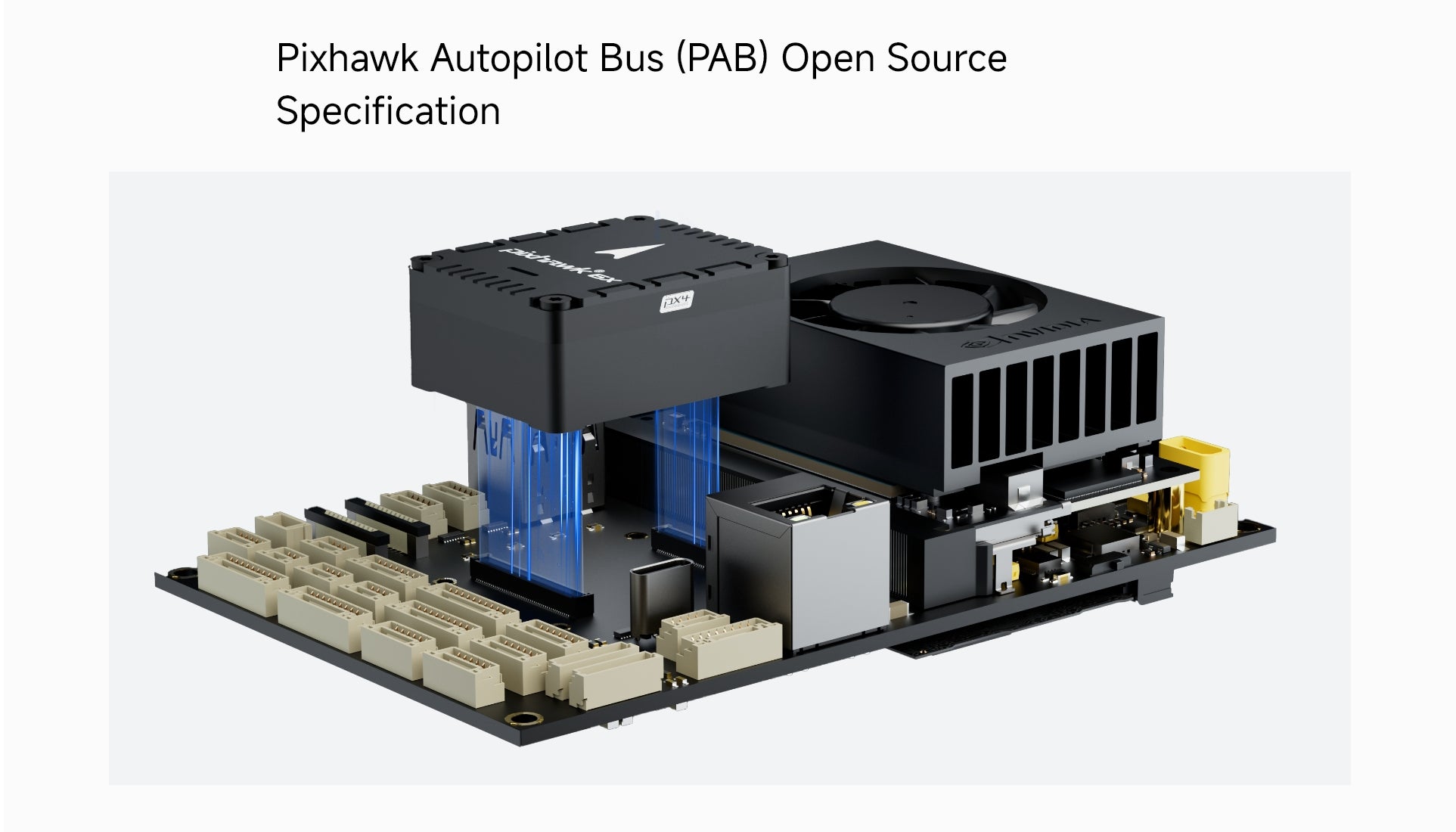
The Holybro Pixhawk Jetson Baseboard is based on the Pixhawk Autopilot Bus open source specification and the NVIDIA Jetson Orin NX/Nano Carrier Board. The Pixhawk Autopilot Bus (PAB) Form Factor enables this to be used with any PAB flight controller such as the Pixhawk 6X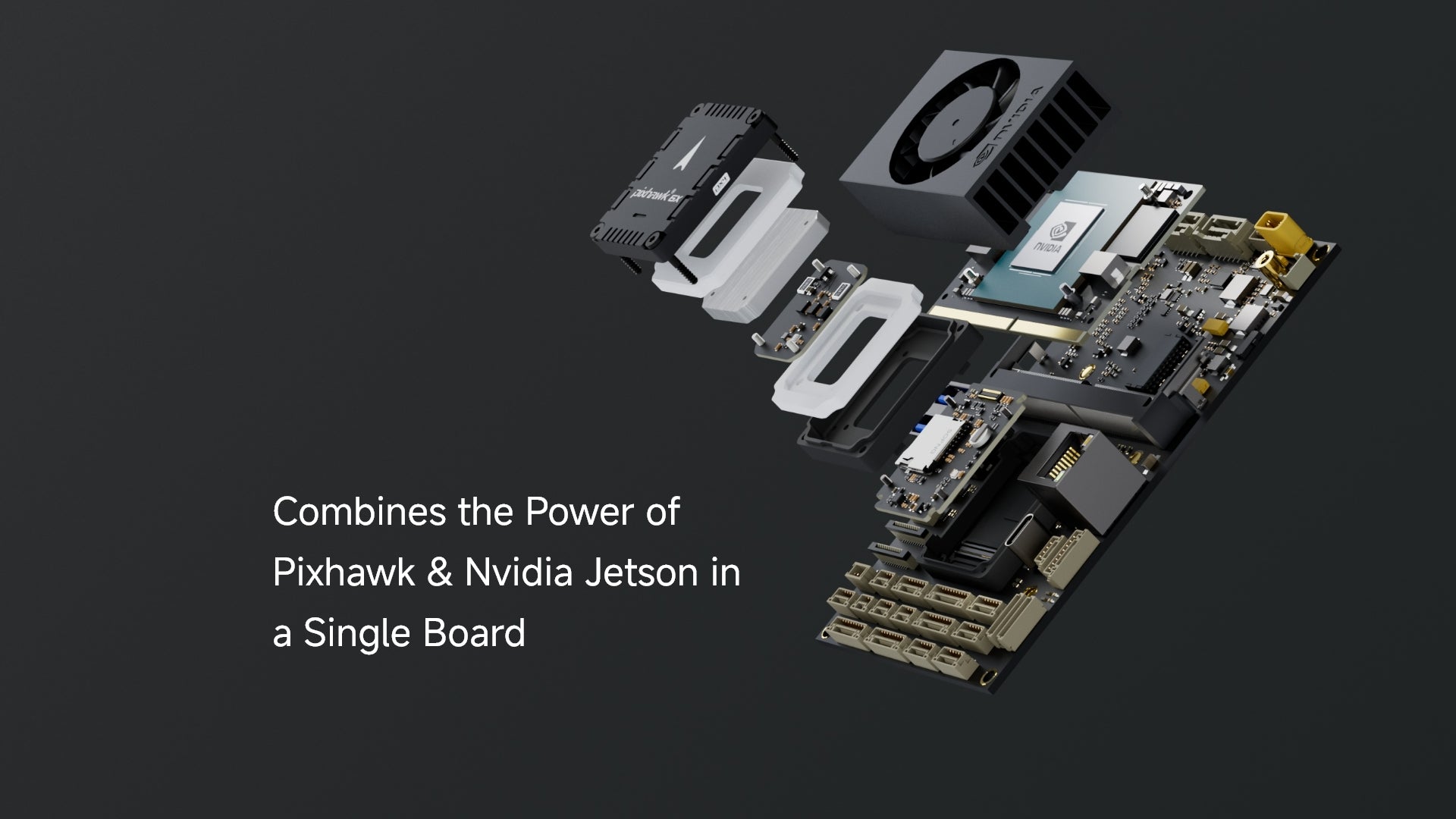




Pixhawk 6X (ICM-45686)
Processors & Sensors
- FMU Processor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- IO Processor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- On-board sensors (Shipping Currently, Rev8)
- Accel/Gyro: 3x ICM-45686 (with BalancedGyro™ Technology)
- Barometer: ICP20100 & BMP388
- Mag: BMM150
Baseboard Port & Connection
Jetson Connectors
- 2x Gigabit Ethernet port
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- Ethernet Switch powered by circuit as the Pixhawk
- 8-pin JST-GH
- RJ45
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 2x MIPI CSI Camera Inputs
- 4 Lanes each
- 22-Pin Raspberry Pi Cam FFC
- 2x USB 3.0 Host Port
- USB A
- 5A Current Limit
- 2x USB 2.0 Host Port
- 5-Pin JST-GH
- 0A Current Limit
- USB 2.0 for Programming/debugging
- USB-C
- 2 Key M 2242 for NVMe SSD
- PCIEx4
- 2 Key E 2230 for WiFi/BT
- PCIEx2
- USB
- UART
- I2S
- Mini HDMI Out
- 4x GPIO
- 6-pin JST-GH
- CAN Port
- Connected to Autopilot’s CAN2 (4 Pin JST-GH)
- SPI Port
- 7-Pin JST-GH
- I2C Port
- 4-Pin JST-GH
- I2S Port
- 7-Pin JST-GH
- 2x UART Port
- 1 for debug
- 1 connected to Autopilot’s telem2
- Fan Power Port
- IIM42652 IMU
- Input Power
- XT30 Connector
- Voltage Rating: 7-21V (3S-4S)
- Separate input power circuits than the Autopilot to ensure flight safety
- Holybro UBEC 12A (3-14S) can be used for application above 4S
- Note: The Pixhawk Jetson Baseboard onboard BEC is only rated for 7-21V (3S-4S). Using the external "UBEC 12A (3-14S)" can provides redundancy and easier replacement in case of BEC failure.
- Power Requirements
- 8V/3A Minimum
- Depends on Usage and Peripherals
Autopilot Connectors
- Pixhawk Autopilot Bus Interface
- 100 Pin Hirose DF40
- 50 Pin Hirose DF40
- Redundant Digital Power Module Inputs
- I2C Power Monitor Support
- 2x – 6 Pin Molex CLIK-Mate
- Power Path Selector w/ Overvoltage Protection
- Voltage Ratings:
- Max input voltage: 6V
- USB Power Input: 4.75~5.25V
- Full GPS Plus Safety Switch Port
- 10-Pin JST-GH
- Secondary (GPS2) Port
- 6-pin JST-GH
- 2x CAN Ports
- 4 Pin JST-GH
- 3x Telemetry Ports with Flow Control
- 2x 6-Pin JST-GH
- 1 is connected to Jetson’s UART1 Port
- 16 PWM Outputs
- 2x 10-Pin JST-GH
- UART4 & I2C Port
- 6-Pin JST-GH
- 2x Gigabit Ethernet port
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-pin JST-GH
- RJ45
- AD & IO
- 8-Pin JST-GH
- USB 2.0
- USB-C
- 4-pin JST-GH
- DSM Input
- 3-pin JST-ZH 1.5mm Pitch
- RC in
- PPM/SBUS
- 5-pin JST-GH
- SPI Port
- External Sensor Bus (SPI5
- 11-Pin JST-GH
- 2x Debug Port
- 1 for FMU
- 1 for IO
- 10-Pin JST-SH
- Dimensions (Without Jetson and Flight Controller Module)
- 126x80x38mm
- Weight
- With Jetson, Heatsink, Flight Controller, M.2 SSD, M.2 Wi-Fi Module 203.2g
UBEC-12A Specifications
- Input voltage: 3~14S (XT30)
- Output voltage: 6.0V/7.2V/8.0V/9.2V (recommend 7.2V if supplying power to Jetson Board)
- Output Current
- Continuous: 12A
- Burst: 24A
- Size: 48x33.6x16.3 mm
- Weight: 47.8g
Reference Wiring Diagram


Reference Links
- Full Pinout
- Dimension & Weight
- Flashing Guide
- CAN Setup
- CSI Camera Setup
- MAVLINK Bridge
- Other Reference Link
- CAD File Download
Package Includes
SKU11072:
- Pixhawk Jetson Orin Baseboard
- Cable Set
Jetson Orin Default Login
- ID:holybro
- PW:123
Write a review
Your Name:
Your Review:
Note: HTML is not translated!
Rating:
Bad
Good
Enter the code in the box below:
© 2025, MG Automation Technologies. Powered by MG Super LABS.Find us on Google+
Designed with by Ish Gupta