GNSS 7 Click





Determine your current position with GNSS 7 click. It carries the NEO-M9N GNSS receiver module from u-blox. Thanks to u-blox’s advanced algorithms and complete GNSS solution, the GNSS 7 click meets even the most stringent requirements in versatile industrial and consumer applications, such as UAVs, vehicles and assets tracking, navigation devices based on GPS, GLONASS, Beidou and Galileo, road navigation devices, public transport, wearable devices, and many more.
GNSS 7 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
GNSS 7 click carries the NEO-M9N an ultra-robust meter-level GNSS positioning receiver module from U-blox. The mentioned module features onboard serial flash memory, message integrity protection, anti-jamming, anti-spoofing, and many more, making this Click board™ meet even the most stringent requirements in versatile industrial and consumer applications, such as UAVs, vehicles and assets tracking.
For RF optimization, the NEO-M9N module features Advanced filtering algorithms mitigate the impact of RF interference and jamming, thus enabling the product to operate as intended. NEO-M9N click is designed mainly for using with NSS/GLONASS compatible active antennas. The NEO-M9 series utilizes concurrent reception of up to four GNSS (GPS, GLONASS, BeiDou, Galileo), recognizes multiple constellations simultaneously and provides outstanding positioning accuracy in scenarios where urban canyon or weak signals are involved.
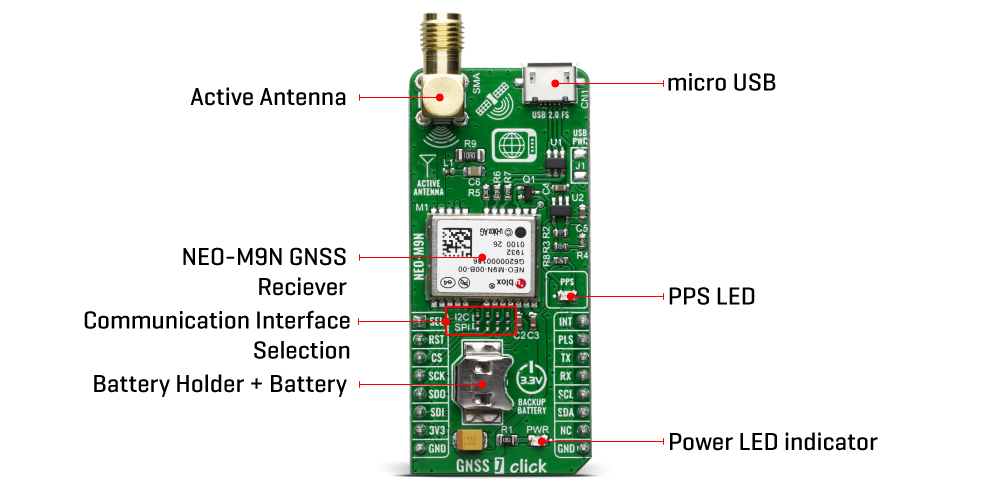
Note: Button battery 1.55V is provided with the GNSS 7 click
The u-blox NEO-M9 modules can also benefit from the u-blox AssistNow assistance service. The Online service provides GNNS broadcast parameters, e.g. ephemeris, almanac plus time or rough position to reduce the receiver’s time to first fix significantly and improve acquisition sensitivity.
Hardware Backup Mode - If the main supply voltage fails, and a battery is connected to V_BCKP, parts of the receiver switch off, but the RTC still runs providing a timing reference for the receiver. This operating mode enables all relevant data to be saved in the backup RAM to allow a hot or warm start later.
The GNSS 7 click supports both SPI and I2C/UART communication protocol configurations. Therefore, this Click board™ have communication interface selection jumpers, in order to allow the user to set whether to use SPI communication or combination. A USB interface (micro USB port), which is compatible with the USB version 2.0 FS (Full Speed, 12 Mbit/s), can be used for communication as an alternative to the UART. The USB port can be used as a power supply as well if you need the click board™ to be a standalone device.
The Click board™ can operate with 3.3V MCUs only, it is set to work over the I2C and UART by default, and it is already equipped with the pull-up resistors. It is ready to be used as soon as it is inserted into a mikroBUS™ socket of the development system.
Specifications:
| Type | GPS+GNSS |
| Applications | Asset tracking, for navigation devices based on GPS and GLONASS, road navigation devices, public transport, wearable devices, etc. |
| On-board modules | The NEO-M9N GNSS receiver module from u-blox with Active antena |
| Key Features | NEO-M9 series utilizes concurrent reception of up to four GNSS (GPS, GLONASS, BeiDou, Galileo) |
| Interface | GPIO,I2C,SPI,UART,USB |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | 3.3V |
PinOut Diagram:
This table shows how the pinout on GNSS 7 click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Interface Select | SEL | 1 | AN | PWM | 16 | EXI | External Interrupt |
| Reset Module | RST | 2 | RST | INT | 15 | PPS | Pulse-Per-Second (Time Pulse) |
| SPI Chip Select | CS | 3 | CS | RX | 14 | RX | UART Receive |
| SPI Clock | SCK | 4 | SCK | TX | 13 | TX | UART Transmit |
| SPI Data OUT | SDO | 5 | MISO | SCL | 12 | SCL | SCL I2C Clock |
| SPI Data IN | SDI | 6 | MOSI | SDA | 11 | SDA | SDA I2C Data |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
OnBoard Settings And Indicators:
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | LED | Power LED Indicator |
| LD2 | PPS | LED | Pulse Per Second (by default) when the GNSS receiver has established a connection with the satellite constellation the LED starts blinking |
| JP1-JP2 | I2C/SPI | UP | Communication Interface Sekection I2C/SPI: Upper position I2C, Lower position SPI |
| JP3-JP4 | UART/SPI | UP | Communication Interface Sekection UART/SPI: Upper position UART, Lower position SPI |
Software Support:
We provide a library for the GNSS7 Click on our LibStock page, as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
Library Description
Library carries generic command parser adopted for GPS-MNEA command based modules. Generic parser
Key functions:
gnss7_cmdSingle- Sends provided command to the modulegnss7_setHandle- Handler assignation to the provied commandgnss7_modulePower- Turn on module
Examples description
The application is composed of three sections :
- System Initialization - Initializes all necessary GPIO pins, UART used for the communcation with GSM module and UART used for infromation logging
- Application Initialization
- Initializes driver, power on module and sends few command for the default module configuration
- Application Task - running in parallel core state machine and checks for call flag. If call detected parser will hang up call.
void application_task ( )
{
char *p_lat;
char *p_long;
char *p_alt;
char rsp_com[ 50 ] = {0};
gnss7_process( );
if ( timer_cnt > 5000 )
{
p_flag++;
if ( p_flag > 2 )
{
p_flag = 0;
}
timer_cnt = 0;
disp_flag = 1;
}
if ( ( p_flag == 0 ) && ( disp_flag == 1) )
{
mikrobus_logWrite( " ---------------------------------------- ", _LOG_LINE );
p_lat = gnss7_gps_parser( &demo_buf[ 0 ], &demo_cmd[ 0 ], 2 );
if ( p_lat == 0 )
{
mikrobus_logWrite( " Latitude : No data available!", _LOG_LINE );
}
else
{
strcpy( &rsp_com[ 0 ], p_lat );
mikrobus_logWrite( " Latitude : ", _LOG_TEXT );
mikrobus_logWrite( rsp_com, _LOG_LINE );
}
disp_flag = 0;
mikrobus_logWrite( " ---------------------------------------- ", _LOG_LINE );
}
if ( ( p_flag == 2 ) && ( disp_flag == 1) )
{
mikrobus_logWrite( " ---------------------------------------- ", _LOG_LINE );
p_alt = gnss7_gps_parser( &demo_buf[ 0 ], &demo_cmd[ 0 ], 9 );
if ( p_alt == 0 )
{
mikrobus_logWrite( " Altitude : No data available!", _LOG_LINE );
}
else
{
strcpy( &rsp_com[ 0 ], p_alt );
mikrobus_logWrite( " Altitude : ", _LOG_TEXT );
mikrobus_logWrite( rsp_com, _LOG_LINE );
}
disp_flag = 0;
mikrobus_logWrite( " ---------------------------------------- ", _LOG_LINE );
}
if ( ( p_flag == 1 ) && ( disp_flag == 1 ) )
{
mikrobus_logWrite( " ---------------------------------------- ", _LOG_LINE );
p_long = gnss7_gps_parser( &demo_buf[ 0 ], &demo_cmd[ 0 ], 4 );
if ( p_long == 0 )
{
mikrobus_logWrite( " Longitude : No data available!", _LOG_LINE );
}
else
{
strcpy( &rsp_com[ 0 ], p_long );
mikrobus_logWrite( " Longitude : ", _LOG_TEXT );
mikrobus_logWrite( rsp_com, _LOG_LINE );
}
disp_flag = 0;
mikrobus_logWrite( " ---------------------------------------- ", _LOG_LINE );
}
}
All additional functions such as timer initialization and default handler.
Notes GPS:
- The GPS module returns data in the form of NMEA responses
- For example, we used the GGA response
For parsing, use the GPS Parser function to send the following form of arguments: The name of the NMEA response that you want to parse, the position of the data that you need. As a response - you will get a separate buffer with the requested data
The full application code, and ready to use projects can be found on our LibStock page.
Other mikroE Libraries used in the example:
- UART
- String
- Conversions
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 click or RS232 click to connect to your PC, for development systems with no UART to USB interface available on the board. The terminal available in all MikroElektronika compilers, or any other terminal application of your choice, can be used to read the message.
MikroSDK:
This Click board™ is supported with mikroSDK - MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
Resources:
Downloads:
Enter the code in the box below: