Magnetic Encoder Pair Kit with Side-Entry Connector for Micro Metal Gearmotors, 12 CPR, 2.7-18V





Product information "Magnetic Encoder Pair Kit with Side-Entry Connector for Micro Metal Gearmotors, 12 CPR, 2.7-18V"
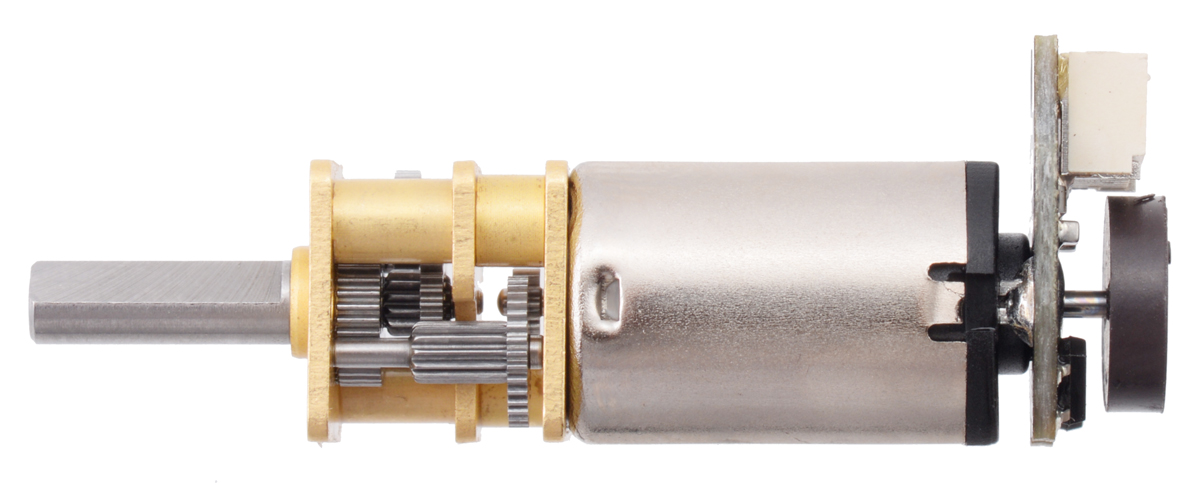
Add quadrature encoders to your micro metal gearmotors (extended back shaft version required) with this kit that uses a magnetic disc and hall effect sensors to provide 12 counts per revolution of the motor shaft. The sensors operate from 2.7 V to 18 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit. These encoders have a side-entry, 6-pin male JST SH-type connector, and we have cables that work with them available in several lengths (12 cm, 30 cm, and 75 cm). This module is compatible with all of the dual-shaft micro metal gearmotors we carry, including the HPCB versions.
This kit includes two dual-channel Hall Effect sensor boards and two 6-pole magnetic discs that can be used to add quadrature encoding to two micro metal gearmotors with extended back shafts (motors and cables are not included with this kit). The encoder board senses the rotation of the magnetic disc and provides a resolution of 12 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output shaft, multiply the gear ratio by 12. This compact encoder solution fits within the 12 mm × 10 mm cross section of the motors on three of the four sides, and it extends 4.2 mm past the edge of the fourth side.
|
|

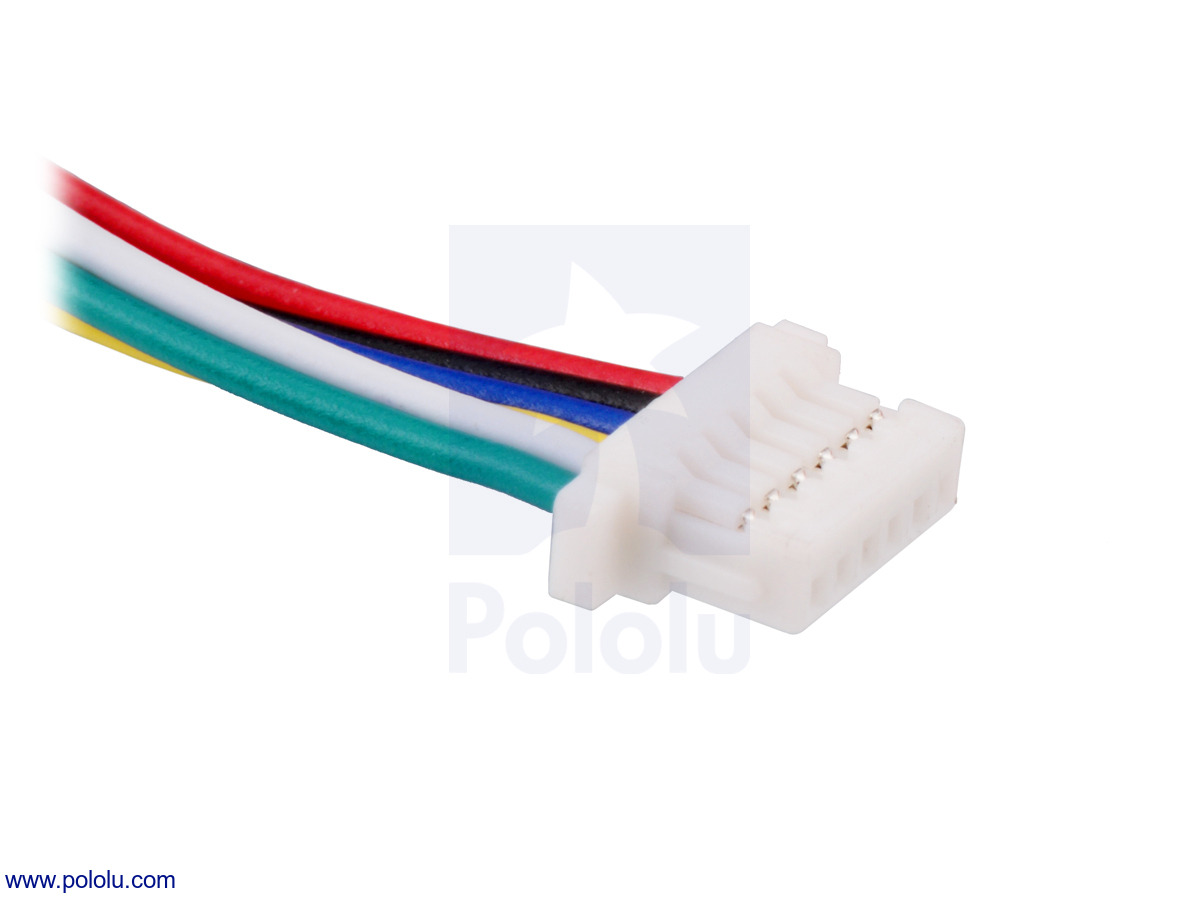
The encoders include a side-entry, 6-pin male JST SH-type connector, and we have cables available for it in three lengths:
 |
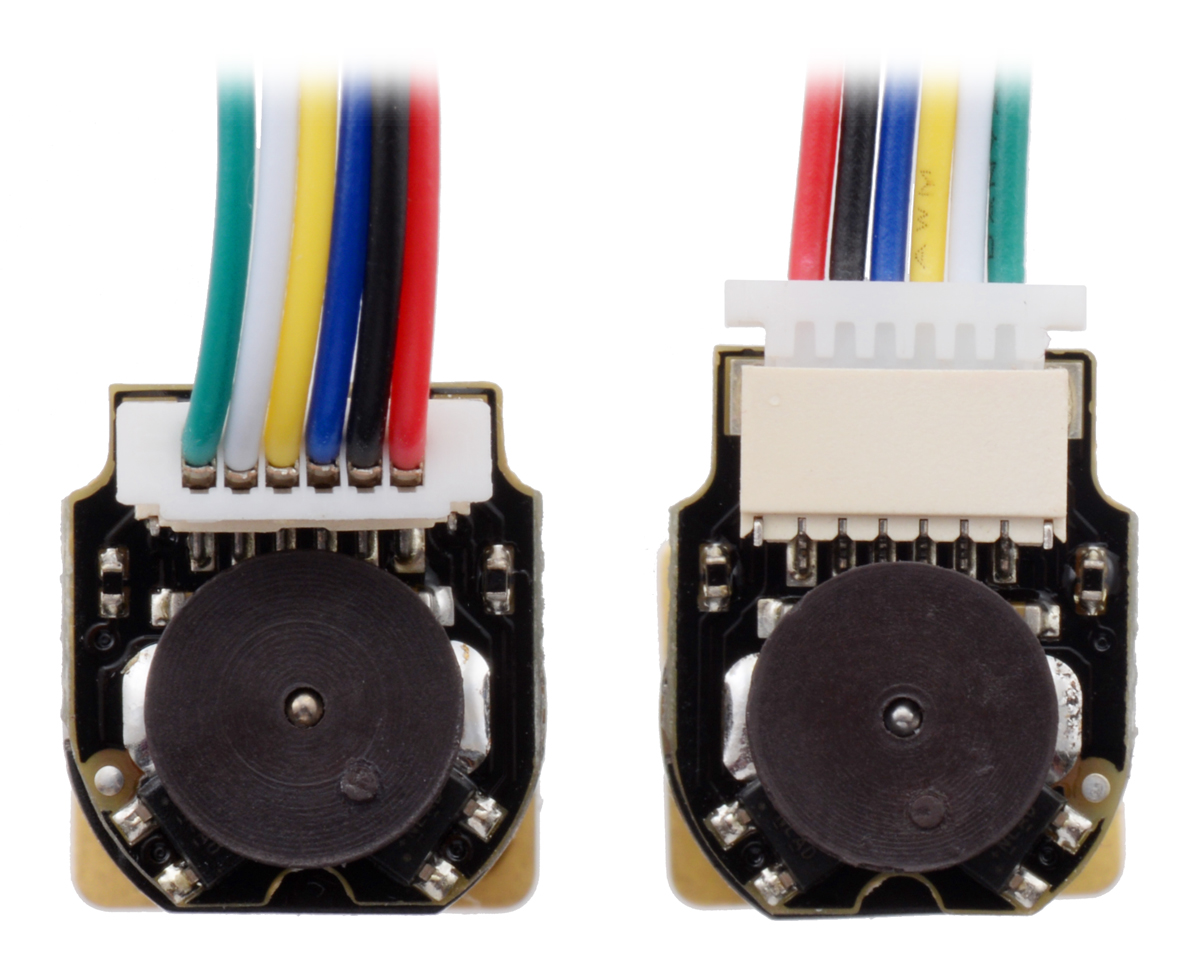
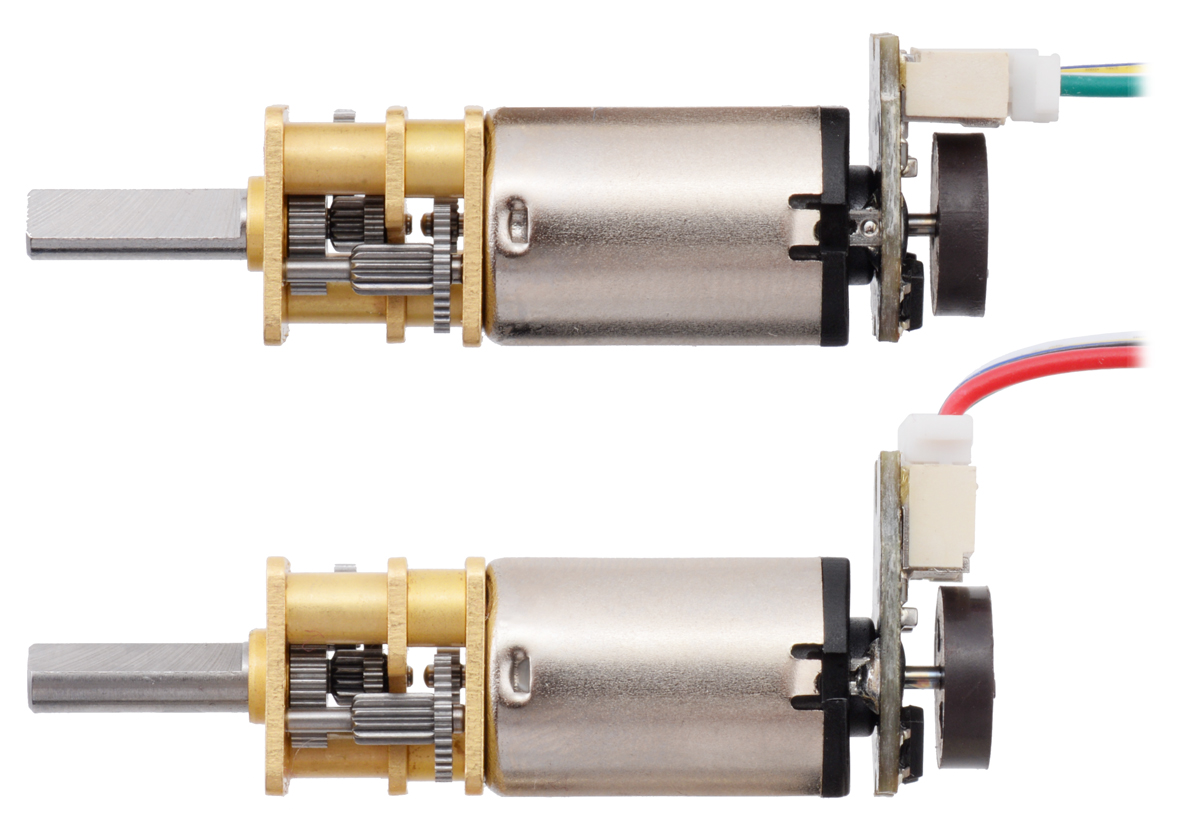
We also carry a version of this encoder with a top-entry connector; the following pictures show comparisons of the top-entry and side-entry versions:
|
|
Note: This sensor system is intended for users comfortable with the physical encoder installation. It only works with micro metal gearmotors that have extended back shafts.
Pinout and installation
The encoder board is designed to be soldered directly to the back of the motor, with the back shaft of the motor protruding through the hole in the middle of the circuit board. One way to achieve good alignment between the board and the motor is to tack down the board to one motor pin and to solder the other pin only when the board is flat and well aligned. Be careful to avoid prolonged heating of the motor pins, which could deform the plastic end cap of the motor or the motor brushes. Once the board is soldered down to the two terminals, the motor leads are connected to the M1 and M2 connector pins as labeled below, and they can be accessed via the red and black wires when used with our corresponding JST cables. The remaining four connector pins are used to power the sensors and access the two quadrature outputs:
|
|
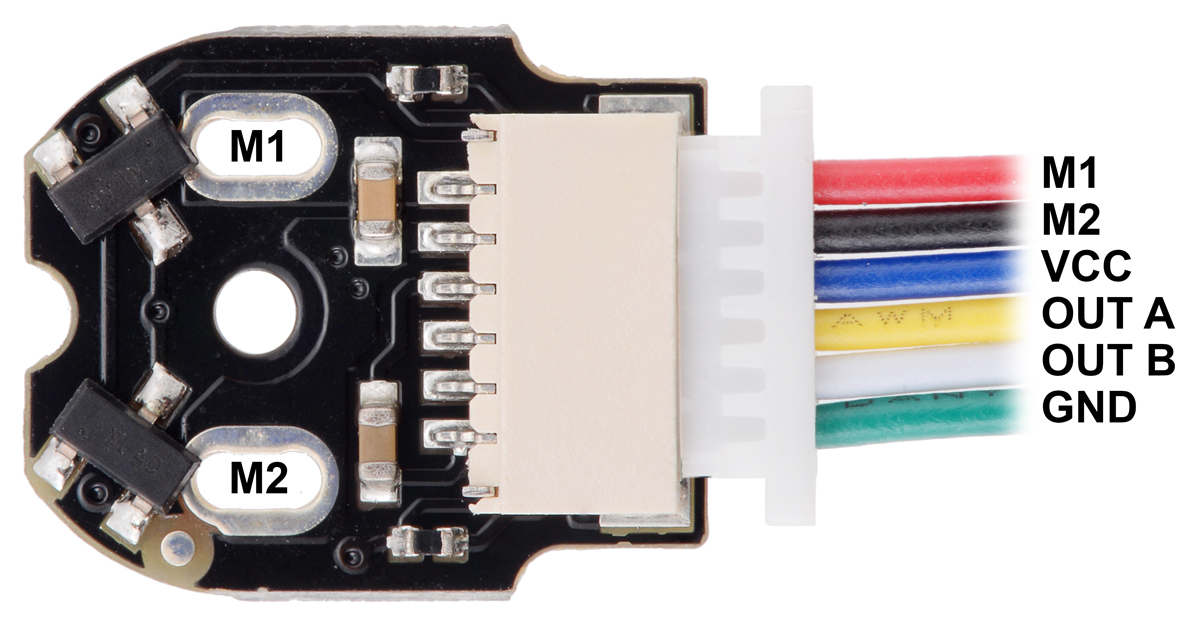

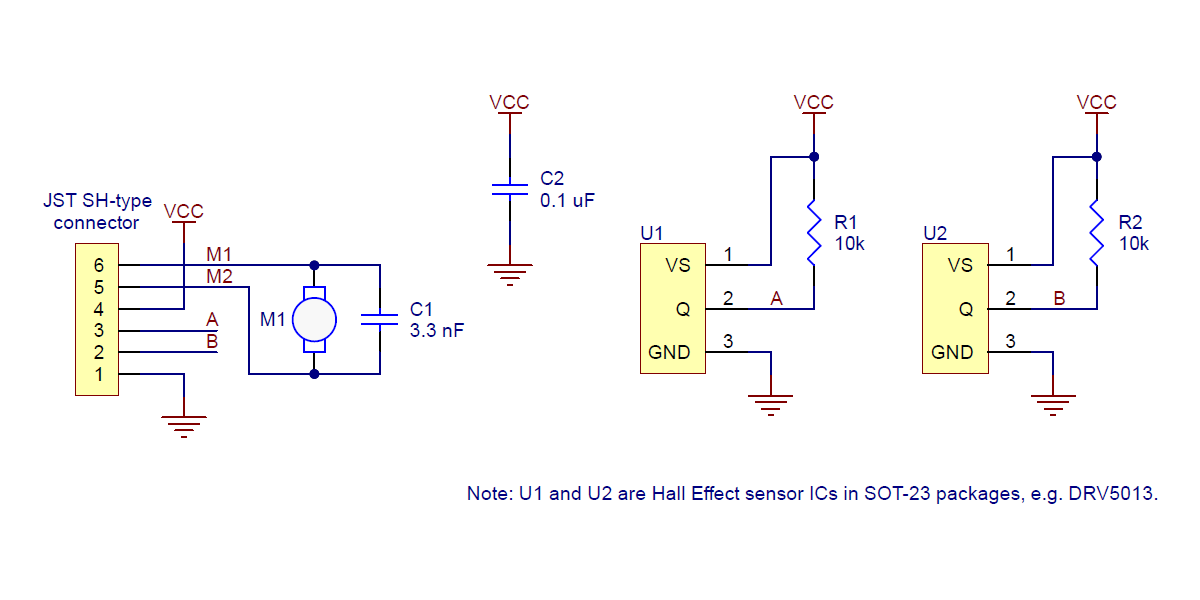
The sensors are powered through the VCC (blue wire) and GND (green wire) pins. VCC can be 2.7 V to 18 V, and the quadrature outputs A and B (yellow and white wires) are digital signals that are either driven low (0 V) by the sensors or pulled to VCC through 10 kΩ pull-up resistors, depending on the applied magnetic field. The sensors’ comparators have built-in hysteresis, which prevents spurious signals in cases where the motor stops near a transition point
 |
|
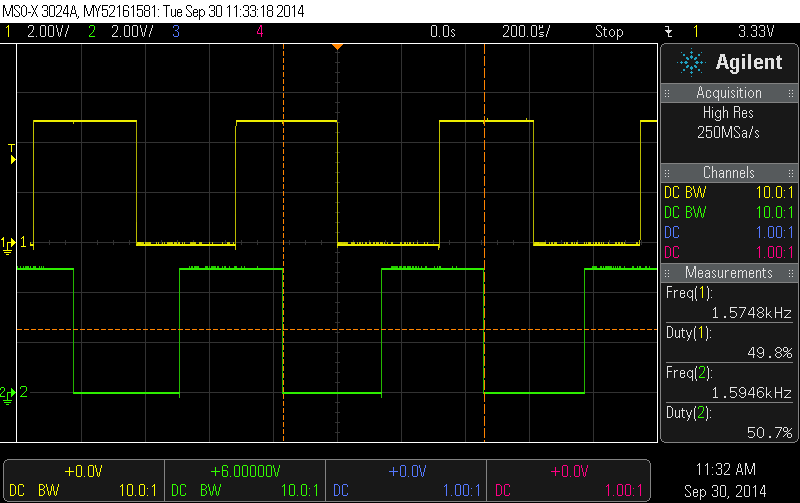
Encoder A and B outputs of a magnetic encoder on a high-power (HP) micro metal gearmotor running at 6 V. |
|---|
Schematic diagram
 |
Comparison to previous version
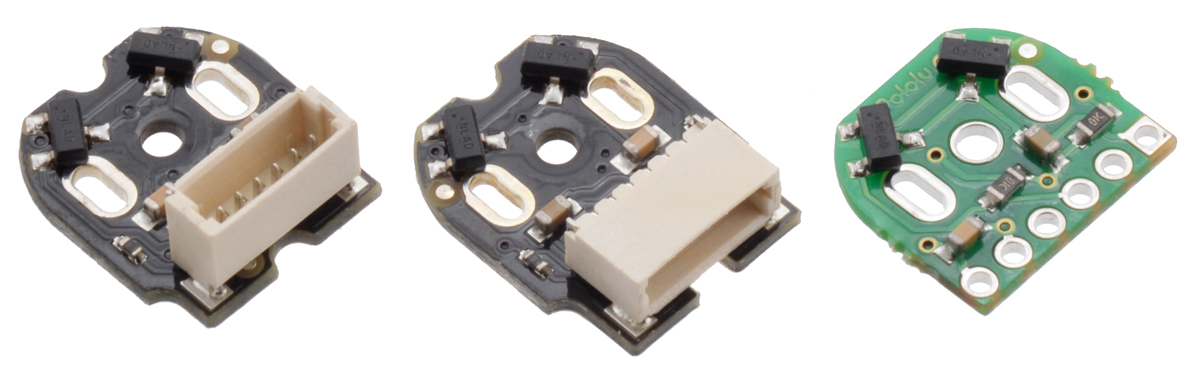
This encoder version is a modification of the previous version that adds a connector to enable the use of removable cables. The basic schematic is unchanged, and the electrical performance is identical. The following picture shows the two new encoders with JST SH-type connectors next to the previous (green) one:
 |
|
Side-by-side comparison of Magnetic Encoder with Top-Entry Connector (left), Side-Entry Connector (center), and 2mm-pitch through-holes (right).
|
|---|
Specifications
Dimensions
| Size: | 14.2 mm × 11.6 mm1 |
|---|---|
| Weight: | 1.5 g2 |
General specifications
| Minimum operating voltage: | 2.7 V |
|---|---|
| Maximum operating voltage: | 18 V |
| Connector: | side-entry, 6-pin male, JST SH-type |
Identifying markings
| PCB dev codes: | enc03d |
|---|---|
| Other PCB markings: | 0J12461 |
Notes:
- The assembled encoder will extend approximately 5 mm beyond the plastic motor end cap.
- Weight of full set. Each encoder board weighs ~0.4 g and each magnet disc weighs ~0.3 g.
Related links to "Magnetic Encoder Pair Kit with Side-Entry Connector for Micro Metal Gearmotors, 12 CPR, 2.7-18V"
- Schematic diagram of the Magnetic Encoder Pair Kit with JST SH-Type Connector (Top-Entry or Side-Entry) for Micro Metal Gearmotors
- Dimension diagrams of the Magnetic Encoder Pair Kit with JST SH-Type Connector (Top-Entry or Side-Entry) for Micro Metal Gearmotors
- 3D models of the Magnetic Encoder Pair Kit with JST SH-Type Connector (Top-Entry or Side-Entry) for Micro Metal Gearmotors
- Drill guides for the Magnetic Encoder Pair Kit with JST SH-Type Connector (Top-Entry or Side-Entry) for Micro Metal Gearmotors
- TI DRV5013 Hall Effect sensor datasheet
Enter the code in the box below: