DC MOTOR 5 click
Product Code: MIKROE-2699





DRV8701 driver features
The DRV8701 is an H-bridge gate driver (also called a pre-driver or controller). The device integrates FET gate drivers in order to control four external NMOS FETs. The device can be powered with a supply voltage between 5.9V and 45V.
Internal protection functions are provided: under-voltage lockout, charge pump faults, overcurrent shutdown, short-circuit protection, pre-driver faults, and overtemperature.
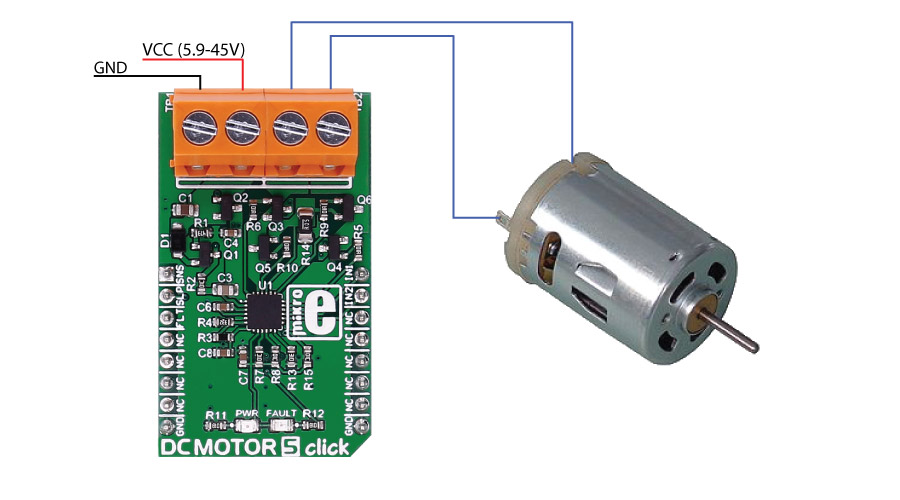
How the click works
The motor's velocity and direction can be adjusted with two PWM input signal's.
Specifications
| Type | DC |
| Applications | Industrial brushed-DC motors, robotics, home automation, etc. |
| On-board modules | DRV8701 Brushed DC Motor Full-Bridge Gate Driver |
| Key Features | supply voltage between 5.9V and 45V |
| Interface | GPIO |
| Click board size | M (42.9 x 25.4 mm) |
Pinout diagram
This table shows how the pinout on DC MOTOR 5 click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Sense comparator output | SNSO | 1 | AN | PWM | 16 | IN1 | Input signal 1 |
| Device sleep mode | SLEEP | 2 | RST | INT | 15 | IN2 | Input signal 2 |
| Fault indication pin | FAULT | 3 | CS | TX | 14 | NC | |
| NC | 4 | SCK | RX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| NC | 7 | 3.3V | 5V | 10 | NC | ||
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Buttons and LEDs
| Designator | Name | Type | Description |
|---|---|---|---|
| LD1 | PWR | LED | Power Indication LED |
| TB1 | VM | CD | Voltage input connector |
| TB2 | Out_M | CD | Motor connector |
Maximum ratings
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply VOltage | 5.9 | 45 | V | |
| Source Current | 6 | 150 | mA | |
| Sink Current | 12.5 | 300 | mA | |
| Applied PWM signal | 100 | kHz | ||
| Operating ambient temperature | -40 | 125 | ℃ |
Programming
Code examples for DC MOTOR 5 click, written for MikroElektronika hardware and compilers are available on Libstock.
Code snippet
The following code snippet shows an example of DC motor 5 click usage. It will detect button press, and change the state of the control pins, putting the motor into one of the 4 possible states.
01 void main()
02 {
03 systemInit();
04
05 while (1)
06 {
07 // Coast
08 if (Button(&GPIOD_IDR, 1, 1, 1))
09 {
10 IN1_PIN = 0;
11 IN2_PIN = 0;
12 }
13
14 // Reverse
15 if (Button(&GPIOD_IDR, 2, 1, 1))
16 {
17 IN1_PIN = 0;
18 IN2_PIN = 1;
19 }
20
21 // Brake
22 if (Button(&GPIOD_IDR, 3, 1, 1))
23 {
24 IN1_PIN = 1;
25 IN2_PIN = 1;
26 }
27
28 // Forward
29 if (Button(&GPIOD_IDR, 4, 1, 1))
30 {
31 IN1_PIN = 1;
32 IN2_PIN = 0;
33 }
34
35 }
36 }
Downloads
mikroBUS™ Standard specificationDRV8701 datasheet
DC MOTOR 5 click schematic
Write a review
Your Name:
Your Review:
Note: HTML is not translated!
Rating:
Bad
Good
Enter the code in the box below:
-
 ₹1,999.00
₹1,999.00




© 2025, MG Automation Technologies. Powered by MG Super LABS.Find us on Google+
Designed with by Ish Gupta