ViperX 300 6 DOF Robot Arm






The ViperX 300-6DOF Robot Arm is made for education and research with support for ROS (Melodic & Noetic), Moveit, Gazebo and MATLAB® as well as demos and instructional videos to help get you up and running with your platform in under an hour. The ViperX 300-6DOF offers 6 degrees of freedom and a payload capacity of 750g. The XSeries arms operate on the same central open-source code repository making it easy to transfer concepts from one platform to another. Perfect for the classroom, the ViperX 300-6DOF is ideal for applications such as vision-based pick & place, machine learning and artificial intelligence.
The ViperX 300 6DOF comes fully assembled and tested and is constructed from extremely rigid 20mm x 40mm extruded aluminum and aluminum brackets. The arm sits on an industrial grade slewing bearing for added stability and accuracy. The electronics are covered with a transparent acrylic shield to keep the electronics free from debris as well as with impact from the arm itself.
Includes:
7 XM540-W270 servomotors
2 XM430-W350-T servomotors
1 Dynamixel U2D2 controller
1 CM9.04c controller
1 12 V 10 A power supply
1 micro USB2 cable
ViperX 300 parts and equipment
Additional foam and rubber for the gripper
Drivers and additional hardware
Mounting material for the base
Specification :-
| Model Nº | ViperX 300 6 DOF |
| Weight | 4.3 Kg |
| Voltage | 12v5a |
| Horizontal reach | 82cm |
| Load capacity | 750 g |
| Reach | 164 cm |
| DOF | 6 |
Documentation:
ViperX 300 Arm Getting Started Guide
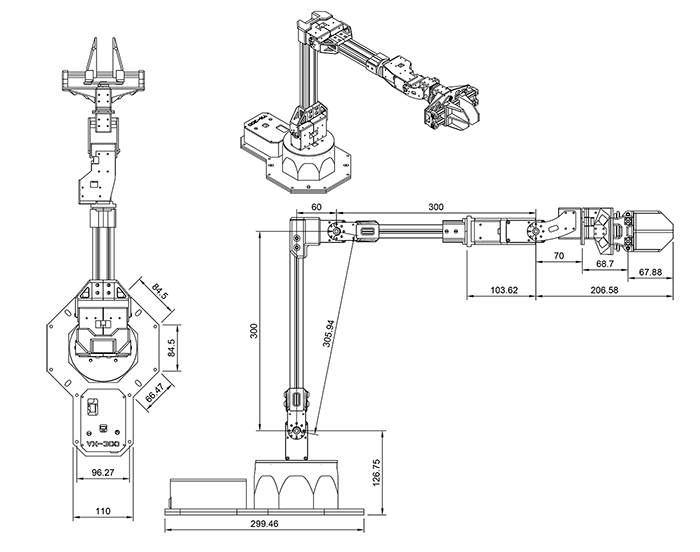
Technical diagram of the ViperX 300 Interbotix arm
Firmware (Alpha)
3D Elements
Dynamixel Servomotor Manuals:
XM540-W270 Manual
XM430-W350 Manual
Dynamixel SDK
OpenCM E-Manual
OpenCM IDE
Enter the code in the box below: