AlphaBot2 robot building kit for BBC micro:bit





AlphaBot2 robot building kit for micro:bit, with controller BBC micro:bit.
This AlphaBot2 robot kit is designed to use with the BBC micro:bit. It features rich common robot functions including line tracking, obstacle avoiding, ultrasonic ranging, Bluetooth/2.4G remote control, etc.
Thanks to the highly integrated modular design, it is fairly easy to assemble by a snap, no soldering, no wiring. After a few minutes spent on hardware assembing, you're almost there, our open source demo codes is ready to help you get started fast.
The micro:bit
The BBC micro:bit is an open development board that allows you to run code on it and have access to all of the hardware.

You can use your BBC micro:bit for all sorts of cool creations, from robots to musical instruments – the possibilities are endless. This little device has an awful lot of features, like 25 red LED lights that can flash messages. There are two programmable buttons that can be used to control games or pause and skip songs on a playlist. Your BBC micro:bit can detect motion and tell you which direction you’re heading in, and it can use a low energy Bluetooth connection to interact with other devices and the Internet.
Hardware
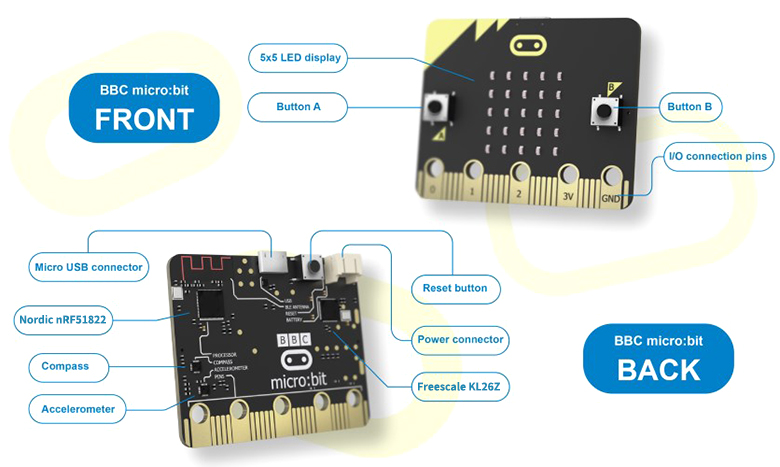
- Nordic nRF51822
- 16 MHz 32-bit ARM Cortex-M0 microcontroller
- Bluetooth® 4.0 low energy/2.4GHz RF SoC
- 16kB RAM
- 256kB Flash
- Freescale KL26Z – 48 MHz ARM Cortex-M0+ MCU
- Compass – Freescale MAG3110 3-axis magnetometer, I2C interface
- Accelerometer – Freescale MMA8652 3-axis accelerometer, I2C interface
- Power connector – 3V power supply
- Reset button – reset the system
- Micro USB connector – for connecting PC, download code, serial communication, etc.
- 5x5 LED display – 5x5 LED grid
- Button A/B – programmable buttons
- I/O connection pins – 5 I/O rings and 20-pin edge connector, including SPI, UART, I2C, Analog, PWM, etc.
- Dimensions – 5cm x 4cm
AlphaBot2 Features
AlphaBot2 employs a 2-layer structure to provide excellent stability and compatibility.
AlphaBot2-Base, the lower base chassis:
- 5-ch infrared sensor, analog output, combined with PID algorithm, stable line tracking
- Onboard modules like line tracking, obstacle avoiding, needs no messy wiring
- TB6612FNG dual H-bridge motor driver, compared with L298P, it's more efficient, more compact, and less heating
- N20 micro gear motor, with metal gears, low noise, high accuracy
- Onboard RGB LEDs, true color lighting, pretty cool
AlphaBot2 for micro:bit, the upper adapter board for controller:
- micro:bit dedicated connector, for easily connecting with the micro:bit
- MP1584 voltage regulator, provides stable 5V output
- RT9193-33 voltage regulator, provides stable 3.3V voltage to the micro:bit
- TLC1543 AD acquisition chip, allows the micro:bit to use analog sensors
- PCA9685 PWM control chip, I/O expander
- Onboard buzzer to play music
What's on the AlphaBot2-Base
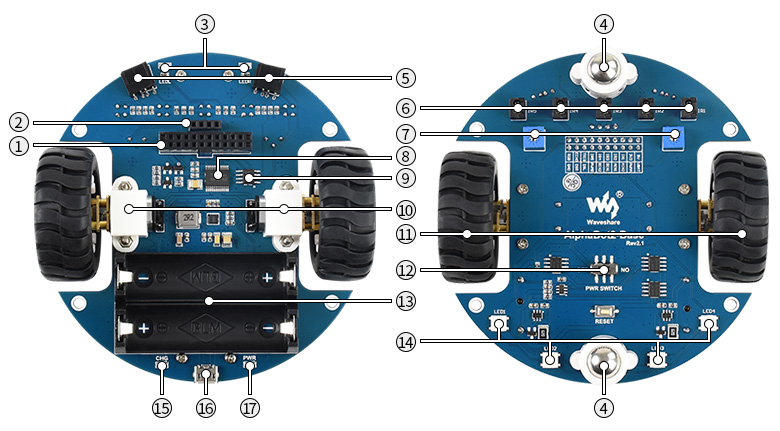
- AlphaBot2 control interface: for connecting sorts of controller adapter board
- Ultrasonic module interface
- Obstacle avoiding indicators
- Omni-direction wheel
- ST188: reflective infrared photoelectric sensor, for obstacle avoiding
- ITR20001/T: reflective infrared photoelectric sensor, for line tracking
- Potentiometer for adjusting obstacle avoiding range
- TB6612FNG dual H-bridge motor driver
- LM393 voltage comparator
- N20 micro gear motor reduction rate 1:30, 6V/600RPM
- Rubber wheels diameter 42mm, width 19mm
- Power switch
- Battery holder: supports 14500 batteries
- WS2812B: true color RGB LEDs
- Power indicator
What's on the AlphaBot2 for micro:bit (Adapter Board)
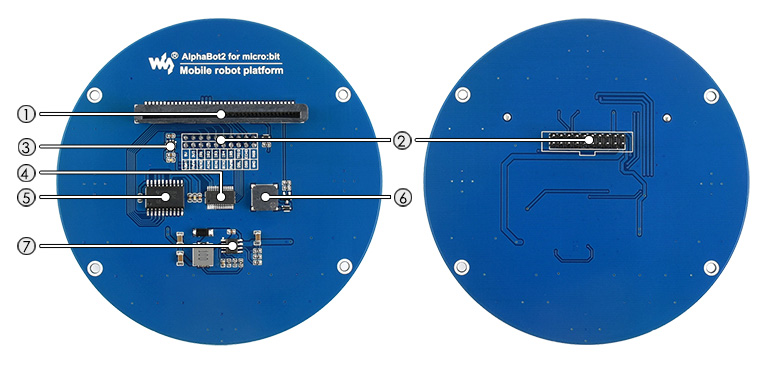
- micro:bit connector
- AlphaBot2-Base header: for connecting with the base board
- RT9193-33: 3.3V voltage regulator, stable power supply for the micro:bit
- PCA9685: PWM control chip, I/O expander, I2C interface
- TLC1543: 10-bit AD acquisition chip, allows the micro:bit to use analog line tracking sensor
- Buzzer
- MP1584 5V voltage regulator



Note: the 2.4G gamepad is NOT included in the price, besides, totally two micro:bit are required for 2.4G RF remote control.
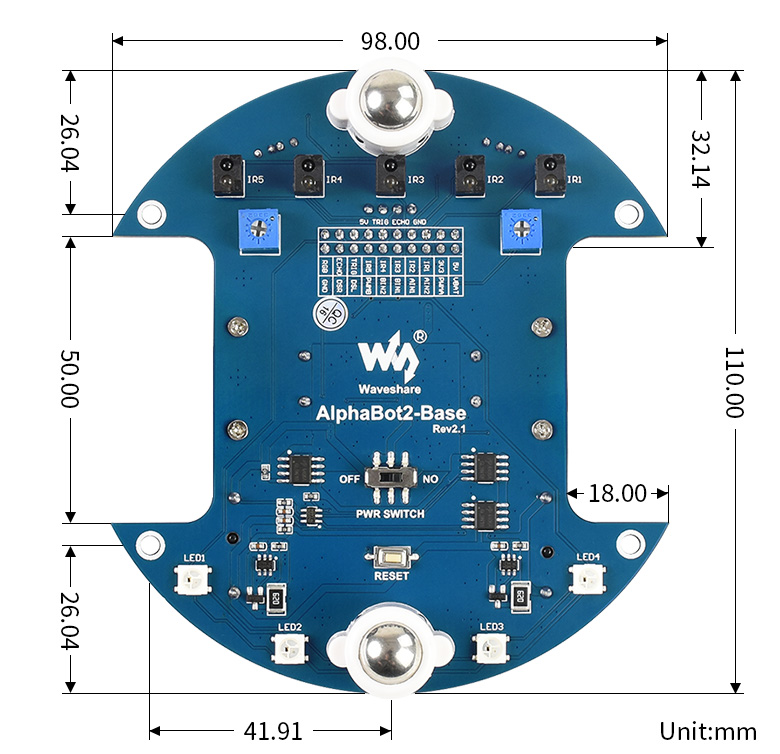
Dimensions
Development Resources
Enter the code in the box below: