10 DOF IMU Sensor, Low Power
Product Code: Waveshare 12476





10 DOF IMU Sensor (C), Inertial Measurement Unit, Lower Power Consumption.
10 DOF IMU Sensor (C) is good at motion monitor, as well as detecting/measuring the position, height, and temperature. It would be helpful for making your own copter or balancing robot, provides great man-machine interaction.
Features
- MPU9250: 3-axis gyroscope, 3-axis accelerometer, and 3-axis compass/magnetometer
- Internal Digital Motion Processing™ (DMP™) engine, offloads complicate fusion calculation, sensor synchronization, gesture recognition, etc.
- Comparing with MPU6050, it is lower power consumption, and more suitable for wearable devices
- BMP280: barometric pressure sensor
- Embedded temperature sensor for temperature compensation
- Comparing with BMP180, it is lower power consumption, and higher performance
- You can get the 10 DOF data through I2C interface
Specifications
- Power: 3.3V~5.5V (internal voltage regulation with low dropout)
- Accelerometer
- Resolution: 16 bit
- Measurement range (configurable): ±2, ±4, ±8, ±16g
- Operating current: 450uA
- Gyroscope
- Resolution: 16 bit
- Measurement range (configurable): ±250, ±500, ±1000, ±2000°/sec
- Operating current: 3.2mA
- Compass/Magnetometer
- Resolution: 14bit
- Measurement range: ±4800µT
- Operating current: 280uA
- Barometric pressure sensor
- Barometric resolution: 0.0016hPa
- Temperature resolution: 0.01°C
- Measurement range: 300~1100hPa (altitude: +9000m ~ -500m)
- Barometric relative accuracy (700hPa~900hPa, 25°C~40°C): ±0.12hPa (±1m)
- Operating current (1Hz update rate, ultra-low power mode): 2.8uA
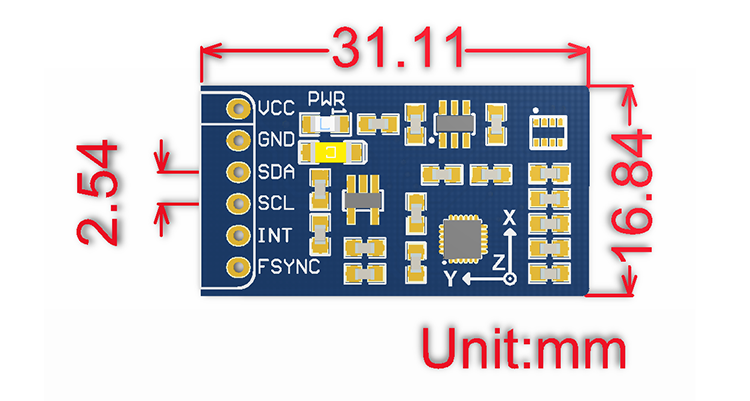
Interface
| Pin No. | Symbol | Description |
|---|---|---|
| 1 | VCC | 3.3V~5.5V power supply |
| 2 | GND | power ground |
| 3 | SDA | I2C data pin |
| 4 | SCL | I2C clock pin |
| 5 | INT | MPU9250 digital interrupt output |
| 6 | FSYNC | MPU9250 frame sync signal |
Dimension
PACKAGE CONTENT
- 10 DOF IMU Sensor (C) × 1
Development Resources
Write a review
Your Name:
Your Review:
Note: HTML is not translated!
Rating:
Bad
Good
Enter the code in the box below:
© 2024, MG Automation Technologies. Powered by MG Super LABS.Find us on Google+
Designed with by Ish Gupta